Une main robotisée pour saisir des objets archéologiques fragiles en eaux profondes : le projet ANR SEAHAND

De l’analyse des gestes de l’archéologue
 Afin de concevoir un préhenseur capable de se substituer à la main de l’archéologue, les chercheurs ont tout d’abord analysé les gestes d’un spécialiste avec des objets caractéristiques, tels que ceux effectués en environnement marin. Les mouvements de doigts, de vitesse, et l’espace de travail balayé par les doigts ont été enregistrés à l’aide d’un gant équipé de marqueurs, pour différents types d’interaction : le balayage du sable, la phase d’approche de l’objet et sa saisie. Les expérimentations ont mis en évidence des plages angulaires assez limitées, une intervention du pouce uniquement pour les mouvements de prises, des couplages articulaires réalisés naturellement par l’expert, et ont souligné le caractère indispensable de la mobilité de certaines articulations.
Afin de concevoir un préhenseur capable de se substituer à la main de l’archéologue, les chercheurs ont tout d’abord analysé les gestes d’un spécialiste avec des objets caractéristiques, tels que ceux effectués en environnement marin. Les mouvements de doigts, de vitesse, et l’espace de travail balayé par les doigts ont été enregistrés à l’aide d’un gant équipé de marqueurs, pour différents types d’interaction : le balayage du sable, la phase d’approche de l’objet et sa saisie. Les expérimentations ont mis en évidence des plages angulaires assez limitées, une intervention du pouce uniquement pour les mouvements de prises, des couplages articulaires réalisés naturellement par l’expert, et ont souligné le caractère indispensable de la mobilité de certaines articulations.
A la conception d’un préhenseur dédié à l’archéologie sous-marine
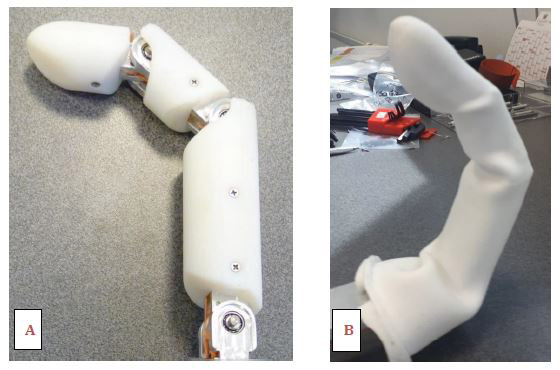 En s’appuyant sur cette analyse, les chercheurs ont ainsi identifié les caractéristiques suivantes pour la conception du préhenseur SEAHAND : le nombre de doigts, le degré de sous-actionnement, le placement des doigts et leur dimensionnement, les vitesses articulaires et les mobilités du poignet. Ils ont adapté un prototype de main robotique développé au sein de l’Institut Pprime, dédié aux opérations de saisie avec précision et basé sur l’utilisation de câbles pour la transmission du mouvement, en vue de concevoir un prototype de doigt marinisé. Le préhenseur SEAHAND possède ainsi 4 doigts, 16 articulations et 6 actionneurs pour contrôler ces articulations, offrant un espace de travail plus important que celui de l’archéologue et un fort potentiel de production de prises stables.
En s’appuyant sur cette analyse, les chercheurs ont ainsi identifié les caractéristiques suivantes pour la conception du préhenseur SEAHAND : le nombre de doigts, le degré de sous-actionnement, le placement des doigts et leur dimensionnement, les vitesses articulaires et les mobilités du poignet. Ils ont adapté un prototype de main robotique développé au sein de l’Institut Pprime, dédié aux opérations de saisie avec précision et basé sur l’utilisation de câbles pour la transmission du mouvement, en vue de concevoir un prototype de doigt marinisé. Le préhenseur SEAHAND possède ainsi 4 doigts, 16 articulations et 6 actionneurs pour contrôler ces articulations, offrant un espace de travail plus important que celui de l’archéologue et un fort potentiel de production de prises stables.
Pour permettre une équipression du système et garantir son étanchéité malgré le milieu abrasif présent dans les fonds marins, les chercheurs ont opté pour la réalisation d’un gant spécifique. Un banc d’essai constitué d’un doigt a été conçu pour évaluer l’influence des différents gants produits par un prestataire externe sur le contrôle du doigt. Le préhenseur est ainsi recouvert d’un gant en silicone souple rempli d’un fluide incompressible, de l’huile diélectrique. Le silicone présente un bon comportement lorsqu’il reste en contact prolongé avec de l’huile et augmente l’adhérence entre les bouts de doigts et les objets, ce qui facilitera leur prise.
Un système avec retour des efforts de serrage exercés par les doigts
L’évaluation des efforts appliqués par les doigts du préhenseur est essentielle pour pouvoir saisir des objets de façon sécurisée en grande profondeur compte tenu de la mauvaise visibilité (présence de sédiments volatiles notamment). La pression élevée des fonds marins rend cependant impossible l’utilisation de capteurs d’efforts externes classiques. Les chercheurs ont donc proposé une méthode de mesure des efforts de serrage basée sur l’évaluation de l’allongement des câbles qui actionnent les articulations. Des tests menés sur banc d’essai ont montré une bonne estimation des efforts de contact en bout de doigts, et ont permis de valider le principe de mesure. Les efforts de serrage seront restitués sur un écran pour que l’opérateur archéologue puisse identifier quand le préhenseur entrera en contact avec un objet ou un obstacle, ou quand le contact sera stabilisé.
En matière de pilotage, la main humaine de l’opérateur archéologue sera utilisée comme référence pour commander la main robotique SEAHAND. Le retour visuel des efforts perçus par chaque doigt sera ainsi combiné à une commande téléopérée du préhenseur. Un « mapping » entre l'espace de la main humaine et celui du préhenseur a été réalisé, compte tenu des différences géométriques et cinématiques, pour faire correspondre au mieux les articulations et éviter des erreurs de positionnement par exemple. Face aux limites des dispositifs actuels de captation du mouvement de la main, identifiées lors d’une analyse comparative (Mizera C. & al, 2020), les chercheurs travaillent aujourd’hui à l’adaptation de la commande du préhenseur. Ils envisagent également de coupler deux dispositifs de captation afin d’augmenter la robustesse du système qui sera utilisé pour le contrôle du préhenseur.
Vers une restitution des efforts extérieurs subis par le mini-véhicule sous-marin
Le pilotage du bras articulé et robot téléopéré (ROV) sur lequel sera fixé le préhenseur, pour le positionnement et l’orientation de la paume de la main robotique, sera réalisé avec une interface spécifique. Celle-ci doit être capable de piloter les 6 degrés de liberté du ROV, de prévoir une compensation de la gravité pour une utilisation longue sans fatigue, être intuitive et présenter un espace de travail important. Un retour des efforts appliqués sur le ROV serait de plus utile à l’opérateur pour détecter d’éventuels obstacles.
Des tests de pilotage d’un ROV développé au sein du laboratoire Pprime et présentant ces critères, ont été réalisés en bassin au LIRMM, mettant en évidence un pilotage aisé et confortable, et validant le retour d’efforts. La structure étant cependant encombrante et peu facilement transportable, les chercheurs travaillent sur une nouvelle version plus compacte et robuste de cette interface. Le contrôleur de l’interface du ROV est par ailleurs basé sur une librairie logicielle de contrôle multi-axes et multi-robots, « RTRobMultiAxisControl », développée par l’équipe du projet SEAHAND et pour lequel un brevet a été déposé. Les chercheurs poursuivent aujourd’hui la réalisation du préhenseur marinisé et de futurs essais de saisie auront lieu en 2020 en aquarium.
Les partenaires du projet
Le projet SEAHAND, financé par l’Agence nationale de la recherche, associe 4 partenaires : l’équipe ROBIOSS au sein de l’Institut PPRIME, Le LIRMM (UMR 5506 – CNRS/Université de Montpellier), le DRASSM (Département des recherches Archéologiques Subaquatiques et Sous-Marines), et le bureau d’étude Becom-d.
Référence :
Mizera C. , Delrieu T., Weistroffer V., Andriot C., Decatoire A. , Gazeau J.P., “Evaluation of hand-tracking systems in teleoperation and virtual dexterous manipulation”, IEEE Sensors Journal, Volume: 20 , Issue: 3 , Feb.1, 2020
En savoir plus :
Vidéo. Le projet ANR Seahand : histoire de la conception d'un préhenseur marinisé