Géolocalisation d’agents d’intervention en l’absence de signal GPS : les résultats du Challenge MALIN organisé par l’ANR et la DGA

Un besoin opérationnel de localisation précise et robuste de l’agent en milieu fermé…
La localisation fiable et précise d’un agent d’intervention civil (sécurité civile, pompiers, etc.) ou militaire dans des environnements non collaboratifs sans signaux GNSS constitue un besoin majeur, auquel les systèmes actuels ne répondent pas. Les contraintes sont nombreuses : l’agent a besoin d’un positionnement 3D pour identifier à quel étage d’un bâtiment il se situe par exemple, d’une géolocalisation en temps réel, précise (de l’ordre du mètre) et robuste, c’est-à-dire fonctionnelle en toutes conditions d’opération (pluie, faible luminosité, fumée, etc.), de jour comme de nuit. L’équipement doit être portatif et peu encombrant pour une localisation autonome de l’agent, et doit présenter un coût de possession limité.
La réponse à ces besoins pose une série de défis techniques majeurs, tels la miniaturisation et l’intégration des capteurs, leur synchronisation, la réalisation de traitements de fusion multicapteurs efficaces et adaptés aux situations complexes, une puissance de calcul permettant de réaliser ces traitements à haute cadence, une faible consommation électrique ou encore une architecture intègre pour éviter les pannes. Les défis liés à l’emploi opérationnel sont également nombreux. La facilité d’emploi est par exemple un besoin important car l’agent doit se concentrer avant tout sur sa mission et sa propre sécurité. Par ailleurs, le porteur de l’équipement est amené au cours de la même mission à adopter des postures extrêmement variées, de la marche « standard » à la course, aux pas chassés, glissades, sauts, montées d’échelle, reptations, etc.
… Décliné en besoin technologique dans le cadre du Challenge MALIN
L’ANR et la DGA ont ainsi lancé un « Challenge » dédié (voir encadré) pour soutenir l’émergence de systèmes autonomes de géolocalisation en environnement complexe (en extérieur, au sein de bâtiments, sous-sol, souterrains, etc.) sans ou avec une mauvaise réception de signaux GNSS. Ce challenge visait également à évaluer ces solutions via le même référentiel méthodologique, lors d’expérimentations en environnement représentatif.
Des spécifications de haut niveau ont été établies. Chaque système conçu devait fournir en temps réel les coordonnées de positionnement de l’agent lors des épreuves. Les systèmes devaient, en fonction secondaire, fournir une cartographie 3D des zones visitées par l’agent, et restituer la direction vers laquelle il regardait. Une initialisation sur source externe GNSS était possible lors de certaines phases spécifiques. Les systèmes devaient également permettre des transitions lisses entre le moment où l’agent est embarqué dans un véhicule et le moment où il est débarqué, pour éviter toute rupture violente dans la localisation, ainsi qu’entre les phases à l’extérieur et à l’intérieur d’un bâtiment. Les informations de localisation devaient être enregistrées dans le système avec une cadence de 5 Hz et un format standard, pour une portabilité des données et un interfaçage facilité avec les équipements de l’agent. Enfin, le volume de l’équipement était autorisé à 8l maximum, sa masse à 4kg maximum, son autonomie devait être supérieure à une heure et le coût des prototypes inférieur à 50 k€.
3 campagnes d’évaluation menées dans un cadre unique et maîtrisé
Le challenge était organisé sur une durée globale d’environ 36 mois autour de trois démonstrations sur site constituées d’un ensemble d’épreuves pour évaluer les équipes. Les sites choisis restituaient des conditions réalistes d’emploi, telles que la traversée de longs tunnels, l’ascension d’une tour, des espaces enfumés ou très peu lumineux. Les évaluations ont été menées selon des critères et métriques partagés, par un jury composé de cinq membres provenant de la DGA et du milieu académique, ayant des compétences reconnues en localisation ou navigation. Enfin, une phase de synthèse de 6 mois a permis aux équipes, à l’ANR et à la DGA de tirer pleinement les enseignements du challenge.
Ce dispositif a placé six équipes dans une situation de mise en compétition, dans un esprit d’émulation mutuelle, en travaillant dans le même intervalle de temps sur le même besoin opérationnel, dans le même environnement et avec les mêmes jeux de données. Le partage était ainsi au cœur du challenge, du besoin technique aux données des épreuves lors des compétitions, afin de stimuler l’innovation sur cette thématique. Les épreuves en environnement réaliste ont été organisées de façon à faciliter les échanges informels entre les équipes, tout en respectant pour chacune sa part de confidentialité.
Le classement final du Challenge MALIN
 Les résultats des épreuves ont été restitués lors du colloque de clôture organisé le 6 juillet dernier. L’ANR et la DGA ont souligné la qualité de l’ensemble des travaux menés par les six équipes, et l’échange croisé qui s’est opéré tout au long du challenge, tant entre équipes qu’avec la DGA et l’ANR. Le classement des trois premières équipes, basé sur une grille de critères assez large, est le suivant :
Les résultats des épreuves ont été restitués lors du colloque de clôture organisé le 6 juillet dernier. L’ANR et la DGA ont souligné la qualité de l’ensemble des travaux menés par les six équipes, et l’échange croisé qui s’est opéré tout au long du challenge, tant entre équipes qu’avec la DGA et l’ANR. Le classement des trois premières équipes, basé sur une grille de critères assez large, est le suivant :
- CyborgLOC
- Smart-Iloc
- TMI-REDY
Focus sur le projet lauréat CyborgLOC
Le projet CyborgLOC, associant SGME et le laboratoire GEOLOC de l’Université Gustave Eiffel, propose une solution technologique basée sur l’utilisation d’unités de mesures inertielles afin d’obtenir une localisation non sujette aux variations d’environnement. La solution est également axée sur l’apprentissage machine afin de modéliser, adapter et classifier les mouvements de l’agent (piétinement, reptation, montée/descente d’escaliers, etc.) pour une meilleure estimation de sa position.
 Le prototype final est constitué d’une antenne GNSS permettant à l’agent d’être autonome sur sa position initiale, d’un capteur pied PERSY pour la localisation de l’agent, et d’une caméra stéréo inertielle pour la cartographie de l’environnement. Les données des capteurs sont enregistrées sur un support de calcul portatif afin de fournir une position en temps réel.
Le prototype final est constitué d’une antenne GNSS permettant à l’agent d’être autonome sur sa position initiale, d’un capteur pied PERSY pour la localisation de l’agent, et d’une caméra stéréo inertielle pour la cartographie de l’environnement. Les données des capteurs sont enregistrées sur un support de calcul portatif afin de fournir une position en temps réel.
Les trois compétitions ont permis à l’équipe d’améliorer le prototype : un baromètre a été ajouté à l’équipement pour mesurer la pression et améliorer la localisation en altitude, et un nouvel algorithme de détection des instants de pied au sol basé sur l’intelligence artificielle a été ajouté au système PERSY pour améliorer la robustesse de la localisation en cas de mouvements à haute dynamique (course, pas chassés, montées et descentes d’escaliers). L’équipe a également ajouté en cours de projet, un couplage entre le GNSS et le système pied pour corriger l’orientation et la position lorsque les signaux GNSS sont suffisamment fiables, ainsi qu’un couplage entre le système pied et le baromètre pour une meilleure estimation de l’altitude. 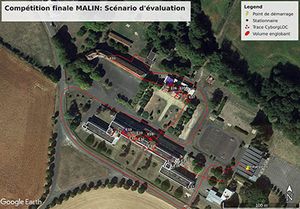 Résultat, le système CyborgLOC est robuste aux difficultés environnementales, notamment les machines tournantes de type moteurs, ainsi qu’aux dynamiques variées de l’agent.
Résultat, le système CyborgLOC est robuste aux difficultés environnementales, notamment les machines tournantes de type moteurs, ainsi qu’aux dynamiques variées de l’agent.
Les performances finales ont révélé une marge d’erreur d’1,09% de la distance parcourue par l’agent en environnement complexe, et de 0,44% pour le scénario de référence (un environnement moins complexe). Ces résultats ont été jugés satisfaisants par rapport à ce que la littérature scientifique rapporte pour des concepts testés dans des conditions bien moins contraignantes d’environnement et de posture de l’agent. Ces travaux seront poursuivis dans le cadre de la start-up nav4you, spin-off du laboratoire GEOLOC de l’Université Gustave Eiffel.
Découvrez les systèmes développés par les 6 équipes
L’instrument de financement « Challenge »
Le dispositif « Challenge » de l’ANR vise à soutenir plusieurs équipes afin d’explorer des approches de recherche multiples sur une même problématique, avec pour ambition la levée de verrous scientifiques, technologiques, méthodologiques, ou d’enjeux de société majeurs. Les travaux sont organisés autour de campagnes d’évaluation pour suivre, tester et confronter les approches mobilisées. Ce dispositif s’inscrit dans une démarche de recherche reproductive : il favorise l’établissement de standards, la production de jeux de données, l’animation et la structuration d’une communauté, et facilite également la valorisation des solutions technologiques développées. De nouveaux challenges ont été lancés depuis tels que le challenge « IA Biodiv » visant à développer la recherche en intelligence artificielle pour une meilleure exploration et exploitation des données de la biodiversité.