Vers des solutions de désherbage économes en produits phytosanitaires : les résultats du Challenge ROSE

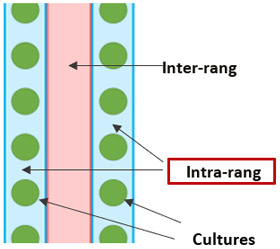 En maraîchage et dans les cultures à large écartement (maïs, tournesol, …), le désherbage entre les rangs des mauvaises herbes ou adventices est souvent effectué via des techniques mécaniques à l’aide de herses ou de bineuses, tandis que le désherbage entre les plants d’un même rang (intra-rang) reste dépendant des pesticides dont l’impact sanitaire et environnemental est aujourd’hui fortement questionné. Il y a donc un enjeu à mobiliser la robotique pour des pratiques agricoles plus durables.
En maraîchage et dans les cultures à large écartement (maïs, tournesol, …), le désherbage entre les rangs des mauvaises herbes ou adventices est souvent effectué via des techniques mécaniques à l’aide de herses ou de bineuses, tandis que le désherbage entre les plants d’un même rang (intra-rang) reste dépendant des pesticides dont l’impact sanitaire et environnemental est aujourd’hui fortement questionné. Il y a donc un enjeu à mobiliser la robotique pour des pratiques agricoles plus durables.
Un challenge précurseur dans le domaine du vivant, axé sur la « coopétition »
Instrument de financement spécifique de l’ANR, le challenge permet de soutenir simultanément plusieurs équipes de recherche autour d’une même problématique avec des approches différentes, et de tester et confronter les solutions technologiques dans le cadre de campagnes d’évaluation. Il encourage les partenariats entre des acteurs académiques et industriels, ainsi que l’implication d’utilisateurs finaux en vue d’encourager le développement d’outils opérationnels et leur acceptabilité.
Cette forme de « coopétition », contraction des termes compétition et coopération, présente des intérêts au regard de la diversité des pistes envisageables pour le désherbage sur le rang (détection des adventices ou des cultures comme cibles, action mécanique ou par choc électrique). A noter que ce challenge fut une première en matière de robotique agricole, impliquant un travail sur le vivant en conditions pédoclimatiques réelles et donc aléatoires, ce qui représentait un défi pour la répétabilité et la reproductibilité des évaluations.
Quatre campagnes d’évaluation ont été organisées par le LNE et INRAE sur des cultures de maïs et haricots à l’Agro Technopole de Montoldre, selon des protocoles et métriques définis en concertation avec les consortia.
Les solutions ont été évaluées sur leurs capacités à :
- Détecter des adventices et/ou des plantes d’intérêt à partir d’images ;
- Désherber les adventices identifiées par des marqueurs jaunes sans endommager les plantes identifiées par des marqueurs bleus (cf visuel ci-dessus) ;
- Combiner les deux approches précédentes en désherbant les adventices sans endommager les cultures sur le rang complet.
Le projet BIPBIP, lauréat du Challenge ROSE
Lors du webinaire de clôture, Thierry Damerval, président-directeur général de l’ANR, a souligné la qualité de l’ensemble des travaux menés par les quatre équipes et a annoncé le lauréat du challenge désigné par le comité de pilotage.
 Le projet BIPBIP associait cinq partenaires académiques et professionnels : les laboratoires IMS et LaBRI du CNRS, le CTIFL, l’entreprise ELATEC et les Fermes Larrère. Il a permis la mise au point d’un bloc-outil robotisé assisté par imagerie, destiné au binage mécanique dans le rang de cultures au stades les plus précoces. Il est compatible avec de multiples cultures et itinéraires techniques.
Le projet BIPBIP associait cinq partenaires académiques et professionnels : les laboratoires IMS et LaBRI du CNRS, le CTIFL, l’entreprise ELATEC et les Fermes Larrère. Il a permis la mise au point d’un bloc-outil robotisé assisté par imagerie, destiné au binage mécanique dans le rang de cultures au stades les plus précoces. Il est compatible avec de multiples cultures et itinéraires techniques.
Cet outil est conçu pour être autonome, peu énergivore et embarqué sur tout type de porteur agricole (tracteur thermique ou électrique, traditionnel ou robotisé). Il est utilisable seul ou réplicable pour traiter plusieurs rangs simultanément et augmenter ainsi le débit de chantier.
Cette solution s’appuie sur un système de vision et des capacités de calcul embarqués pour détecter les cultures et localiser leur tige grâce à des algorithmes d’intelligence artificielle (IA) préalablement entrainés sur des bases de données annotées. Les informations sont transmises à un système décisionnel contrôlant un dispositif mécanique de précision réalisant le binage des mauvaises herbes à une échelle centimétrique.
« Les essais ont validé la preuve de concept pour la détection et le binage en temps réel » souligne Jean-Pierre Da Costa, chercheur au laboratoire IMS et coordinateur du projet. L’intégration de cet outil dans une stratégie agronomique globale de gestion des adventices devrait permettre aux agriculteurs de traiter les stades les plus précoces de croissance des cultures. Des développements futurs restent toutefois nécessaires pour améliorer la précision et la rapidité de l’action afin d’atteindre des cadences de travail optimales. Ces travaux ont fait l’objet de plusieurs publications scientifiques internationales et d‘une thèse de doctorat. Ils ont également reçu la médaille d’argent du Concours SIVAL Innovation 2022 venant couronner le prototype développé.
De nouvelles pistes, porteuses de solutions
Les autres projets du Challenge ROSE ont également suscité des avancées scientifiques dans plusieurs domaines : vision, IA, capteurs, sécurité, modélisation ou robotique.
 Le projet ROSEAU a mis au point une solution robotique pour l’identification et la classification d’adventices et de plantes d’intérêt à tous les stades de développement, reposant sur de l’imagerie multispectrale et des méthodes de traitement d’images et d’apprentissage profond. L’équipe a utilisé les robots PUMAgri et Trektor de l’entreprise SITIA, coordinatrice du projet.
Le projet ROSEAU a mis au point une solution robotique pour l’identification et la classification d’adventices et de plantes d’intérêt à tous les stades de développement, reposant sur de l’imagerie multispectrale et des méthodes de traitement d’images et d’apprentissage profond. L’équipe a utilisé les robots PUMAgri et Trektor de l’entreprise SITIA, coordinatrice du projet.
La gestion des adventices est effectuée à l’aide d’un outil de « désherbinage » combinant une action chimique localisée et mécanique pour optimiser la quantité d’intrants aux adventices ne pouvant être détruit par l’action mécanique. Cette combinaison du chimique et du mécanique permet de réduire au dixième les quantités d’herbicide appliquées.
La navigation du robot est basée sur des algorithmes de suivi des rangs. De plus, en vue de proposer une navigation robuste du robot, sans dépendance aux réseaux 4G, la solution s’appuie sur des données Lidar et des stratégies de détection des anomalies. Les partenaires ont également développé une interface mécanique permettant de bouger l’outil de désherbage et de corriger les derniers centimètres, y compris face à un défaut de terrain, afin de proposer un outil au plus près des rangs. Le projet a contribué à plusieurs publications scientifiques et deux thèses. Toutefois, la troisième tâche du challenge, dédiée à l’évaluation de l’action de désherbage dans le respect des cultures, n’a pas pu être évaluée lors des campagnes de terrain, l’équipe soulignant des difficultés organisationnelles. L’entreprise SITIA poursuit actuellement ses développements sur le robot Trektor.
Le projet PEAD visait à développer, à partir d’un plateforme de tracteur électrique existante, une solution robotisée autonome pour un binage systématique inter et intra-rang, avec l'ambition de réduire de 100% l’usage des herbicides. La solution s’appuie sur la détection en temps réel des cultures en conditions environnementales complexes et face à une forte variabilité des stades de développement des adventices et des plantes.
L’équipe a développé des algorithmes d’IA et de traitement robuste des données fournies par des capteurs intelligents embarqués, pour la prise de décision. La solution repose sur une navigation autonome en milieu ouvert basée sur la vision embarquée uniquement, sans données GPS.
 Les développements du projet ont été validés dans des simulations réalistes en utilisant des jumeaux numériques, et ont été testés lors des campagnes du challenge. L’évaluation de l’action globale sur la parcelle a cependant été interrompue en raison d’une panne sur la fin du premier rang traité.
Les développements du projet ont été validés dans des simulations réalistes en utilisant des jumeaux numériques, et ont été testés lors des campagnes du challenge. L’évaluation de l’action globale sur la parcelle a cependant été interrompue en raison d’une panne sur la fin du premier rang traité.
L’Institut XLIM, porteur du projet, poursuit ses recherches notamment dans le cadre du challenge ACRE du projet européen METRICS, en vue de proposer un nouveau démonstrateur à l’autonome 2023. Le partenaire SABI-AGRI poursuit ses travaux sur l’autonomie de machines agricoles électriques au sein du Laboratoire Commun (Labcom) TIARA avec l’INRAE, et le partenaire Carbon Bee sur la commercialisation et l'évolution de la nouvelle version du capteur utilisé durant le projet.
 Le projet WeedElec a travaillé sur une solution robotique associant un moyen aérien de détection des adventices par drone, couplé à un robot à bras de la société ECOROBOTIX équipé de caméras et d’un outil de désherbage électrique haute tension. L’équipe a développé des algorithmes de reconnaissance d’images par apprentissage profond pour la détection de différentes espèces d’adventices et des cultures, et a mis au point un dispositif autonome de destruction visant uniquement l’adventice d’intérêt avec un risque minimum pour la culture.
Le projet WeedElec a travaillé sur une solution robotique associant un moyen aérien de détection des adventices par drone, couplé à un robot à bras de la société ECOROBOTIX équipé de caméras et d’un outil de désherbage électrique haute tension. L’équipe a développé des algorithmes de reconnaissance d’images par apprentissage profond pour la détection de différentes espèces d’adventices et des cultures, et a mis au point un dispositif autonome de destruction visant uniquement l’adventice d’intérêt avec un risque minimum pour la culture.
Ce dispositif nécessite peu d'énergie, que ce soit pour la destruction (de l'ordre du Joule par adventice) ou pour le déplacement du vecteur. Le désherbage électrique à faible énergie est efficace uniquement au stade jeune de développement, cependant la croissance de l'adventice aux stades ultérieurs sera ralentie. Les essais ont montré une sensibilité différenciée à l’électrocution selon les espèces adventices concernées. L’équipe souligne des freins, notamment l’absence de dispositifs terrains maitrisés hors des campagnes d’évaluation. Ainsi, la solution n’a pas pu être testée en conditions réelles avant épreuve et n’a pas pu être évaluée sur la troisième tâche dédiée à l’évaluation globale de l’action de désherbage sur la parcelle. Par ailleurs, son faible débit de chantier résultant du choix d’une action « plante par plante » nécessite de paralléliser les bras électrocution ou d’augmenter le nombre de robots à qui l’on assignerait la mission de désherber une parcelle.
Au-delà des avancées scientifiques, les projets ont de plus partagé en open source leurs bases de données d’images annotées.
Des acquis pour l’évaluation en robotique agricole
« Le Challenge ROSE a permis de définir une méthodologie et une boîte à outils permettant de mieux organiser, structurer et fiabiliser les challenges en robotique agricole » explique Bernard Picque, directeur adjoint de la Direction des essais et certification au LNE. Dans le cadre de ROSE ont ainsi été conçus un guide d’annotation des images acquises sur le terrain, un outil d’annotation, une nouvelle brique pour la suite logicielle LNE-MATICS, gratuite et open source pour l’exploration de données et l’évaluation de systèmes, ou encore des guides dédiés aux observations et actions de comptage sur le terrain. L’ensemble de ces outils élaborés pour ROSE sont réutilisés dans le cadre du Challenge ACRE du projet Européen METRICS (2020-2023) concernant la navigation et le désherbage intra-rang dans différentes grandes cultures.
En conclusion du webinaire, Thierry Damerval souligne que « le Challenge ROSE valide la pertinence de ce dispositif sur trois grands principes : un objectif clairement défini, une diversité des approches et des parties prenantes, et une robustesse des méthodes d’évaluation. […] L’articulation entre recherche amont et finalisée, l’implication d’utilisateurs finaux et la prise en compte de la validité économique des solutions proposées sont également essentielles ».
L’instrument challenge a depuis été étendu à un autre domaine impliquant la part d’imprévisibilité inhérente à un système vivant, avec un suivi de la biodiversité, dans le cadre du Challenge IA-Biodiv lancé en partenariat avec l’Agence française de développement (AFD). De plus, le partenariat entre l’axe Recherche et Innovation du Plan Écophyto et l’ANR se poursuit dans le cadre du Programme Écophyto Maturation.
